





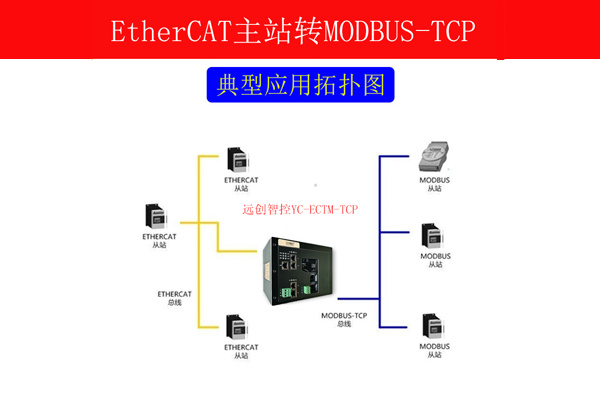
EtherCAT总线协议转换网关案例
ETHERCAT主站转Modbus tcp协议网关modbus tcp功能码
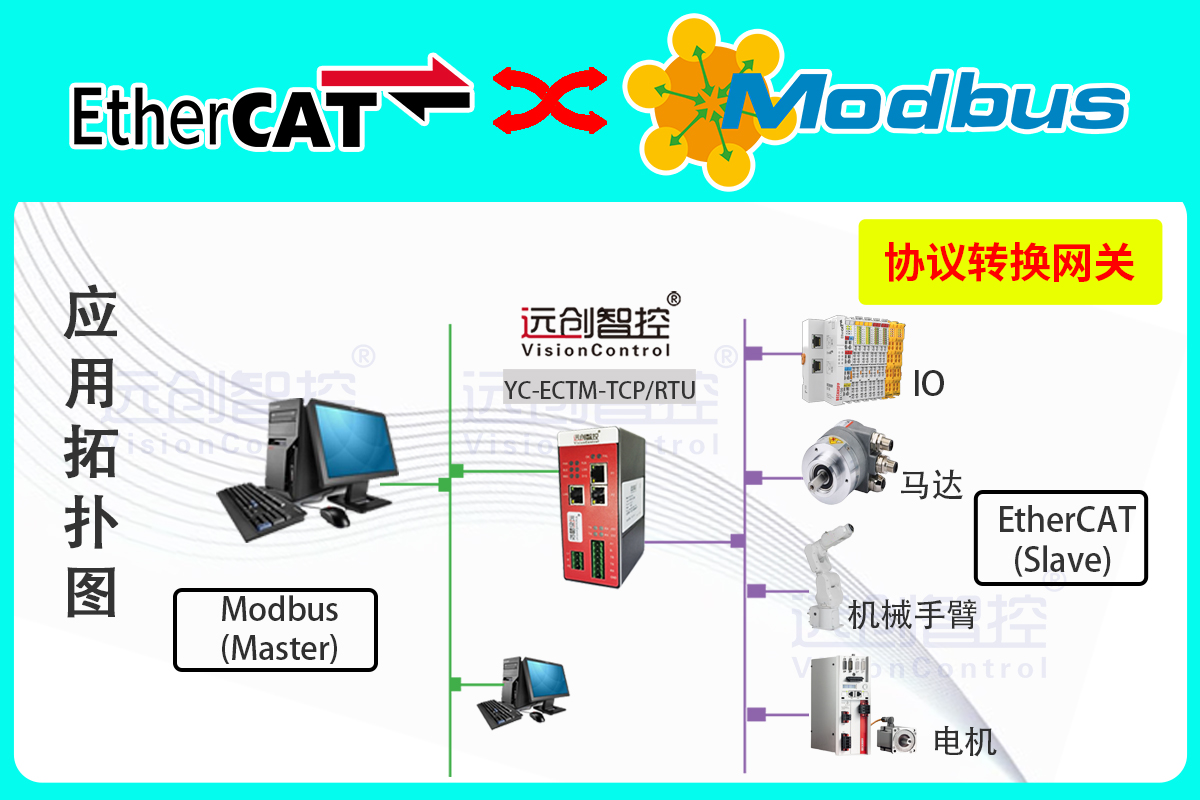
你是否曾经遇到过协议不同,导致工作效率低下?远创智控YC-ECTM-TCP通讯网关,帮你解决这个问题!
在传统的工业自动化生产线中,早期的设备如传感器、计量仪表、小型控制器等大多采用Modbus TCP协议进行通信,这些设备在长期的生产过程中稳定运行且为企业的生产做出了重要贡献。然而随着技术的发展和企业对生产效率、精度以及智能化管理的要求不断提高,新引入的先进设备如高速高精度的机器人、自动化加工中心等往往采用ETHERCAT协议,并且整个生产线的控制系统核心也逐渐升级为基于ETHERCAT主站的架构,以便实现更快速的数据传输和更精准的设备协同控制。为了充分利用现有的Modbus TCP设备,同时使这些设备能够与新的 ETHERCAT 主站系统无缝对接,实现生产线的全面升级和优化,就需要使用远创智控YC-ECTM-TCP协议网关
2, 远创智控YC-ECTM-TCP通讯网关,是一款自主研发的ETHERCAT主站功能的通讯网关。它可以将ETHERcat网络和MODBUS-TCP网络无缝连接,让沟通更加顺畅。无论是做为主站还是从站,远创智控YC-ECTM-TCP网关都能轻松应对,读写数据,交换缓冲区,实现两边数据的传输。让你的工作更加高效,让你的沟通更加顺畅!
启动网关运行
5.5.1 网关的控制字
网关在 ETHERCAT 一端配置数据长度时,网关内部占用一个 word 的输出,用于对网关 Modbus 一侧通讯的控制。
D7 | D6 | D5 | D4-D3 | D2 | D1 | D0 |
强制复位 | 停止等待 | 清除错误 | 保留 | 写允许 | 读允许 | 启动工作 |
注意:在用户无特殊需求的情况下,不推荐使用其他功能,仅需要将 D0 位置 1,启动网关发送 Modbus 报文即可。
5.5.2 网关的状态字
网关在 ETHERCAT 一端配置数据长度时,网关内部占用一个 word 的输入,用
于显示网关 Modbus 一侧通讯的状态。
D7:奇偶校验 | D6:CRC 校验 | D5:等待超时 | D4~D1:异常应答 | D0:接收/发送 |
0:没有错误 1:奇偶校验错 | 0:没有错误 1:CRC 校验错 | 0:没有错误 1:等待超时 | 0:没有错误 其他:Modbus 访问异常 | 0:准备接收 1:准备发送 |
5.5.3 启动网关的 Modbus 主站
网关的拨码第 1 位拨到 ON,表示网关做为 Modbus 主站运行。
网关的拨码第 8 位拨到 OFF,重新给网关上电,网关进入运行状态。
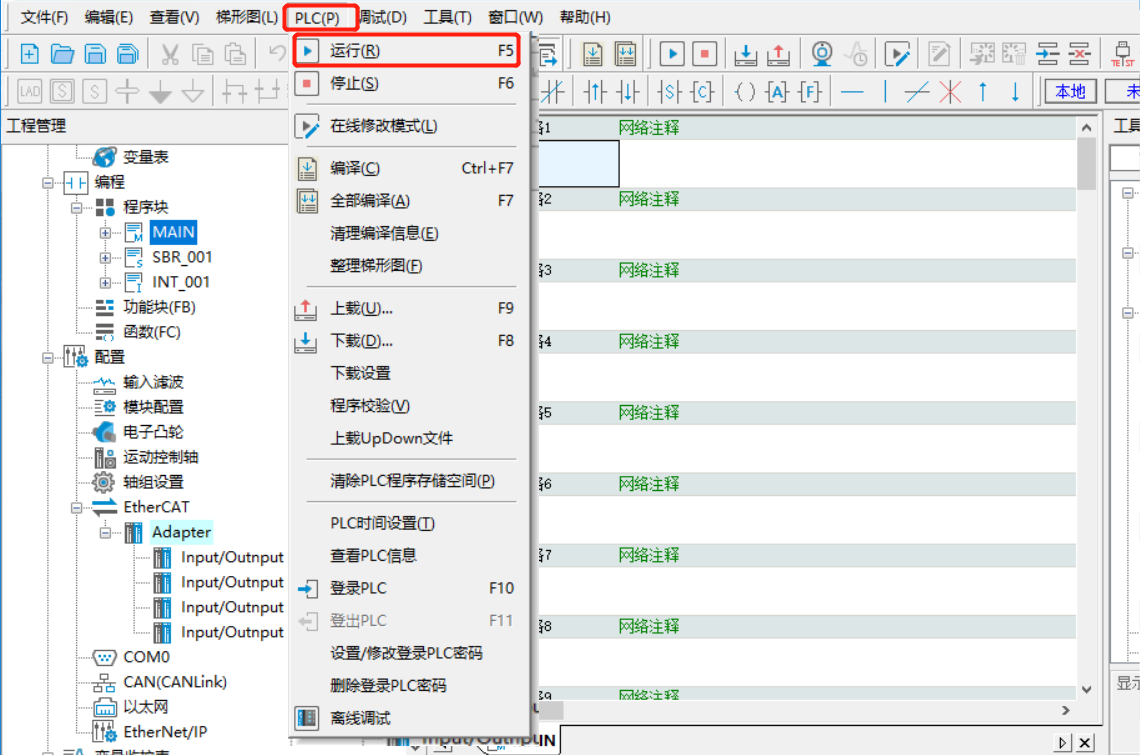
运行 AutoShop软件,点击PLC——运行。
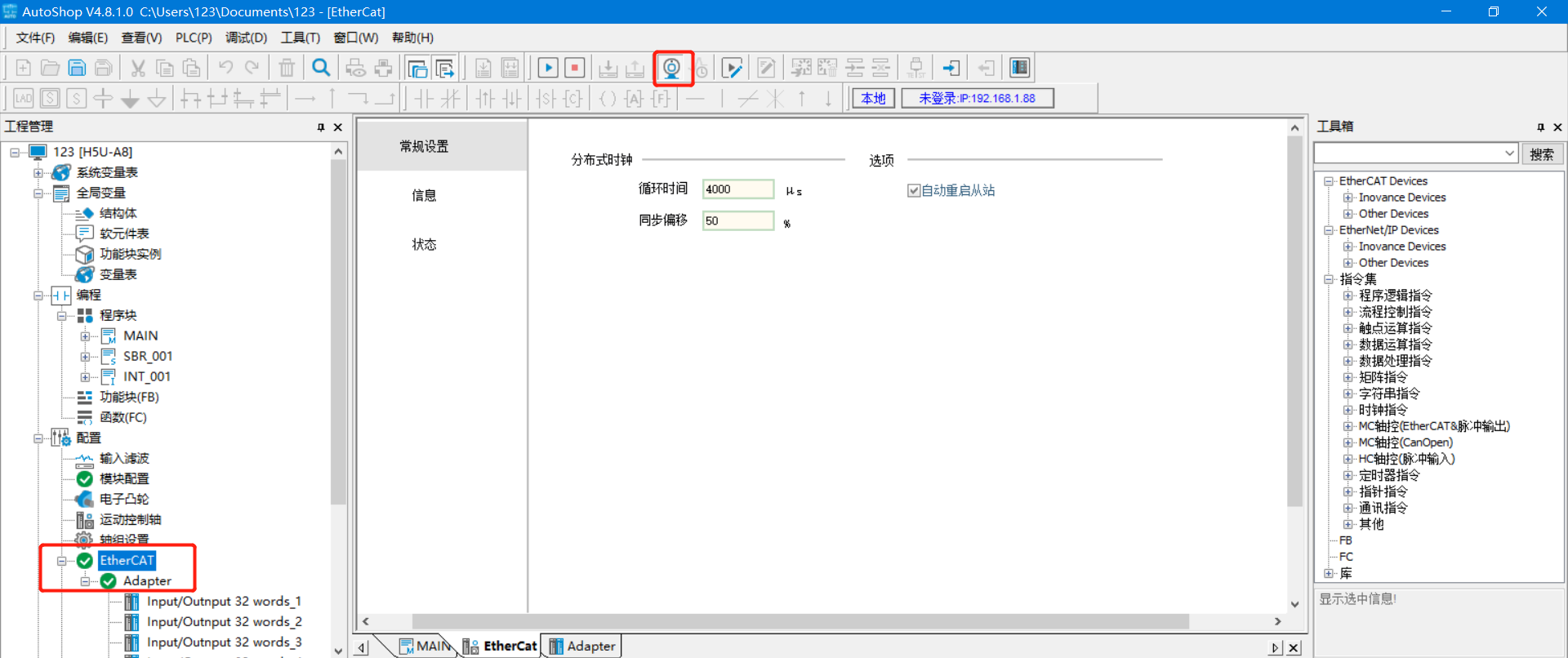
3, 主站与从站建立 ETHERCAT 通讯后,可以使AutoShop软件在线监控后在左侧项目树中看到EtherCAT前有一个“√”,说明主站与从站成功建立 ETHERCAT 连接,同时ETHERCAT 接口的指示灯由红灯变为黄灯,显示屏显示00,RUN灯常亮。
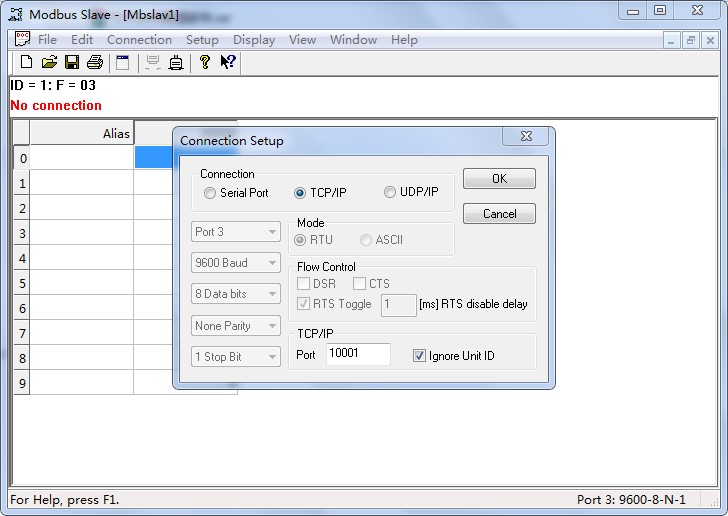
4, 使用 Modbus Slave 软件做为从站,与网关的 P3 口连接进行测试。
点击软件的菜单栏“Connection——Connect…”,设置正确的端口号,然后点击 OK,开始运行。如下图:
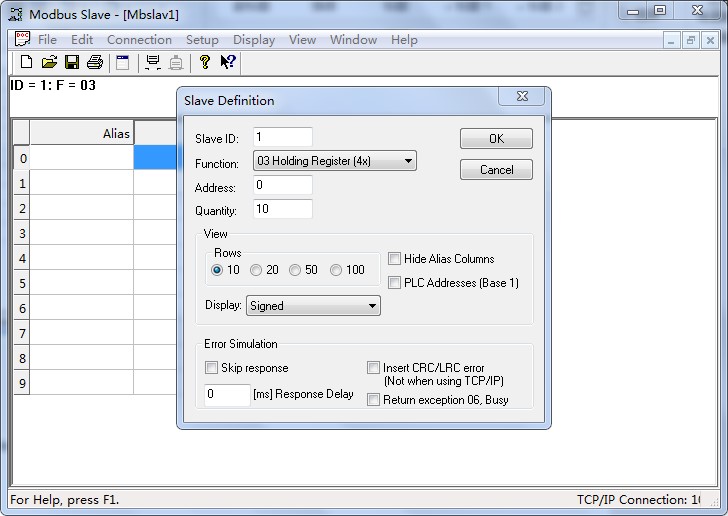
5, 点击软件的菜单栏“Setup——Slave Definition”,设置从站允许访问的数据区,如下图:
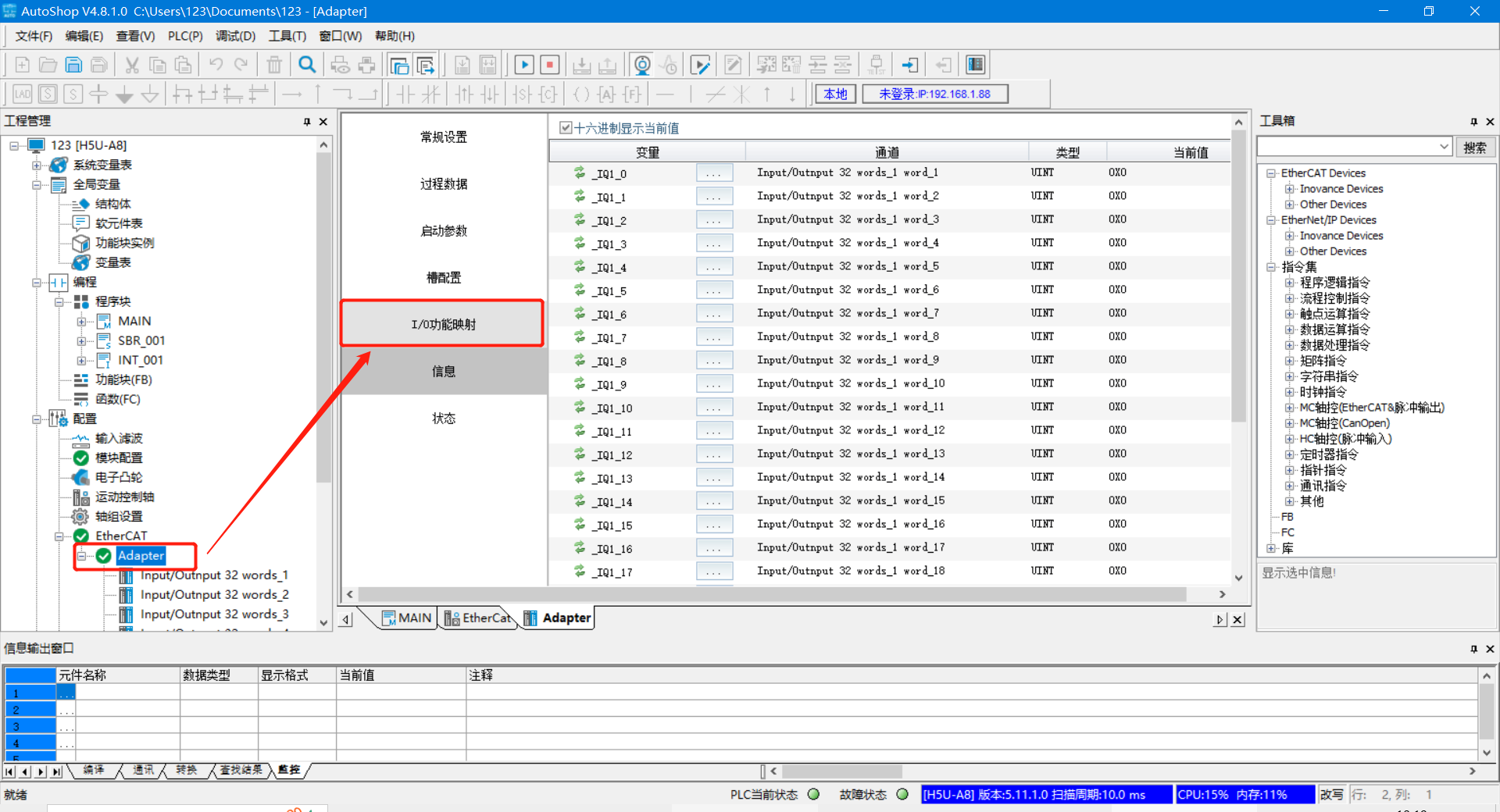
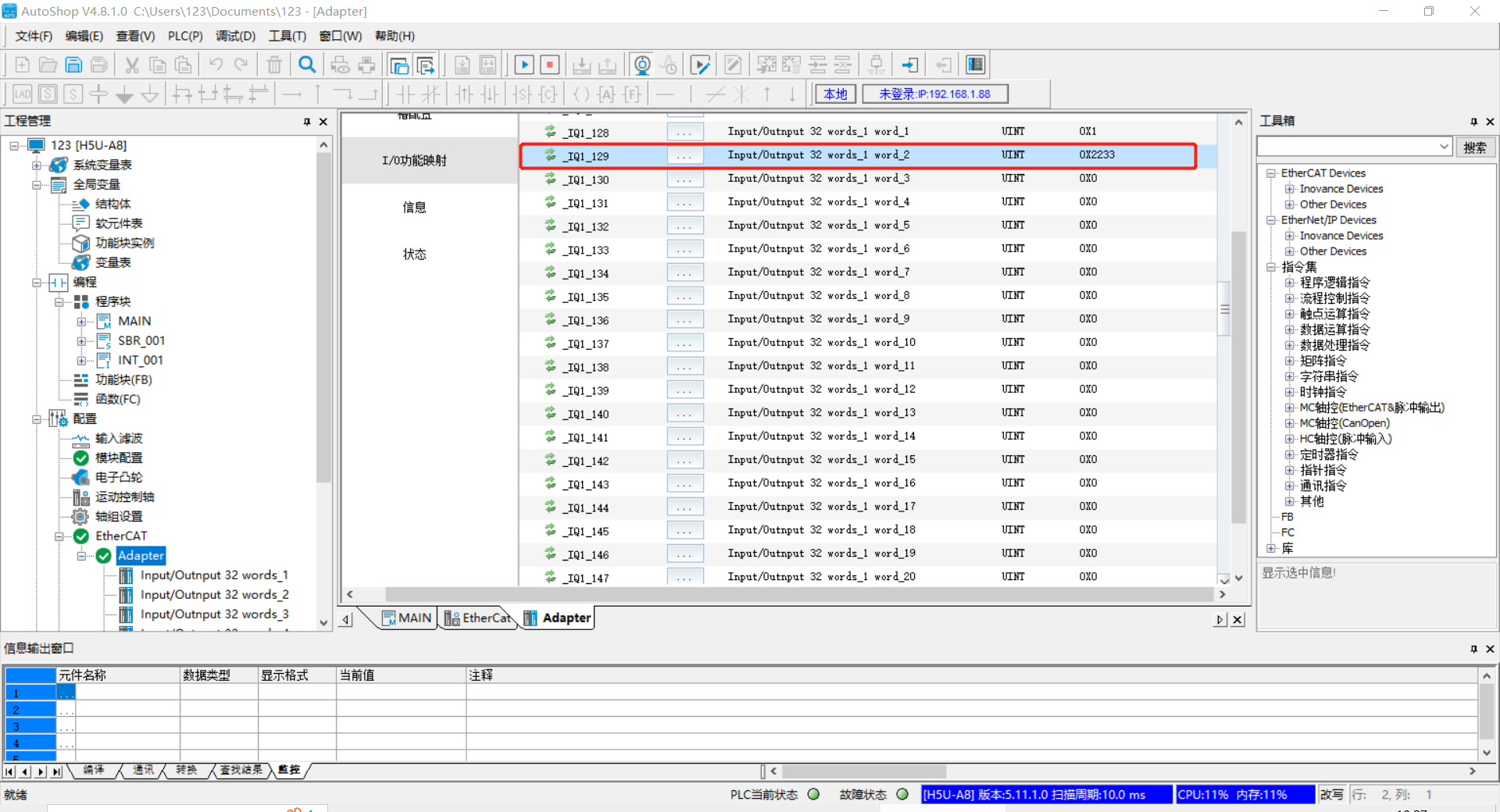
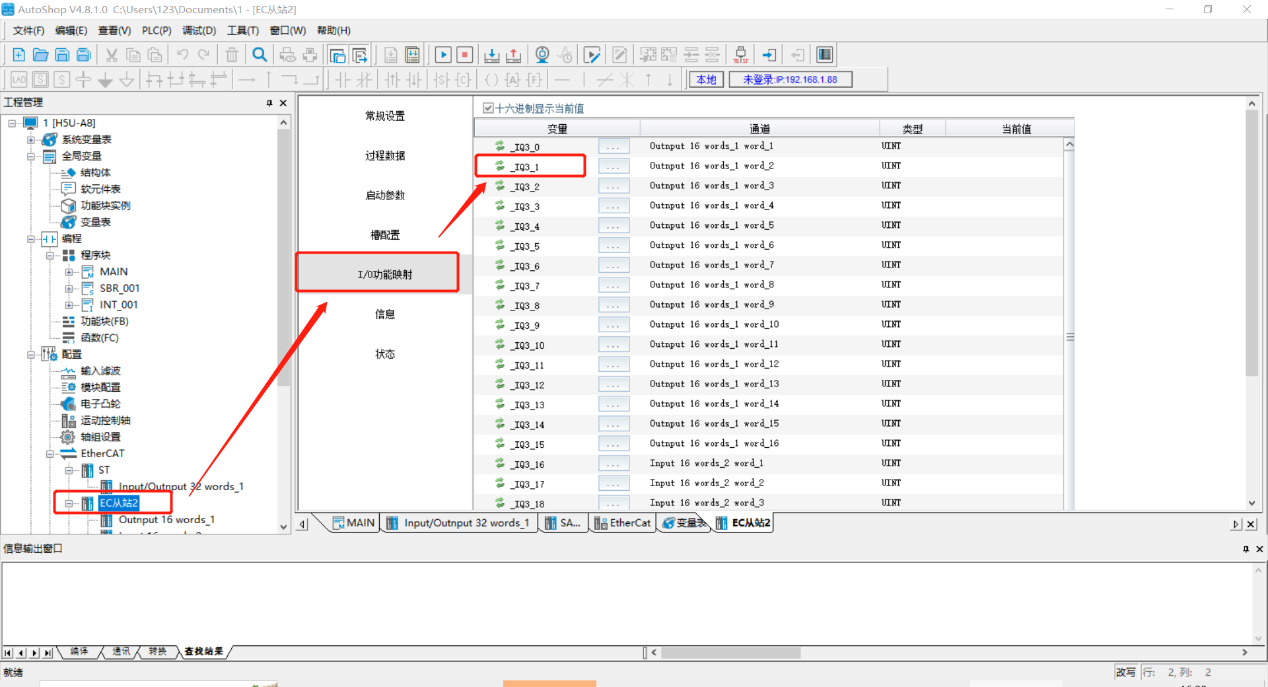
6, 在 ETHERCAT 主站软件上,在左侧项目树中点击EC从站,在弹出的界面中选择“I/O功能映射”,双击某个数据的当前值,可以修改实时的数据值。
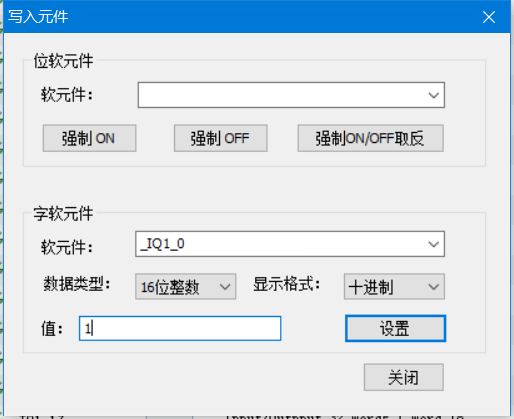
7, 将输出数据的第 1 个 word 赋值为 1(控制字=1),此时可以看到网关 P3 接口的 OK 灯开始闪烁,表示 Modbus-TCP 已经建立连接。
8, 测试数据:
网关配置的第一个字节是读寄存器,我们在 Modbus Slave 软件中,手动修改寄存器的值,如下图:

9, 可以在主站软件中监控到第一个上传数据,改变为 2233,数据修改成功。
10, 在主站软件上手动修改一个 output 数据值,如下图:
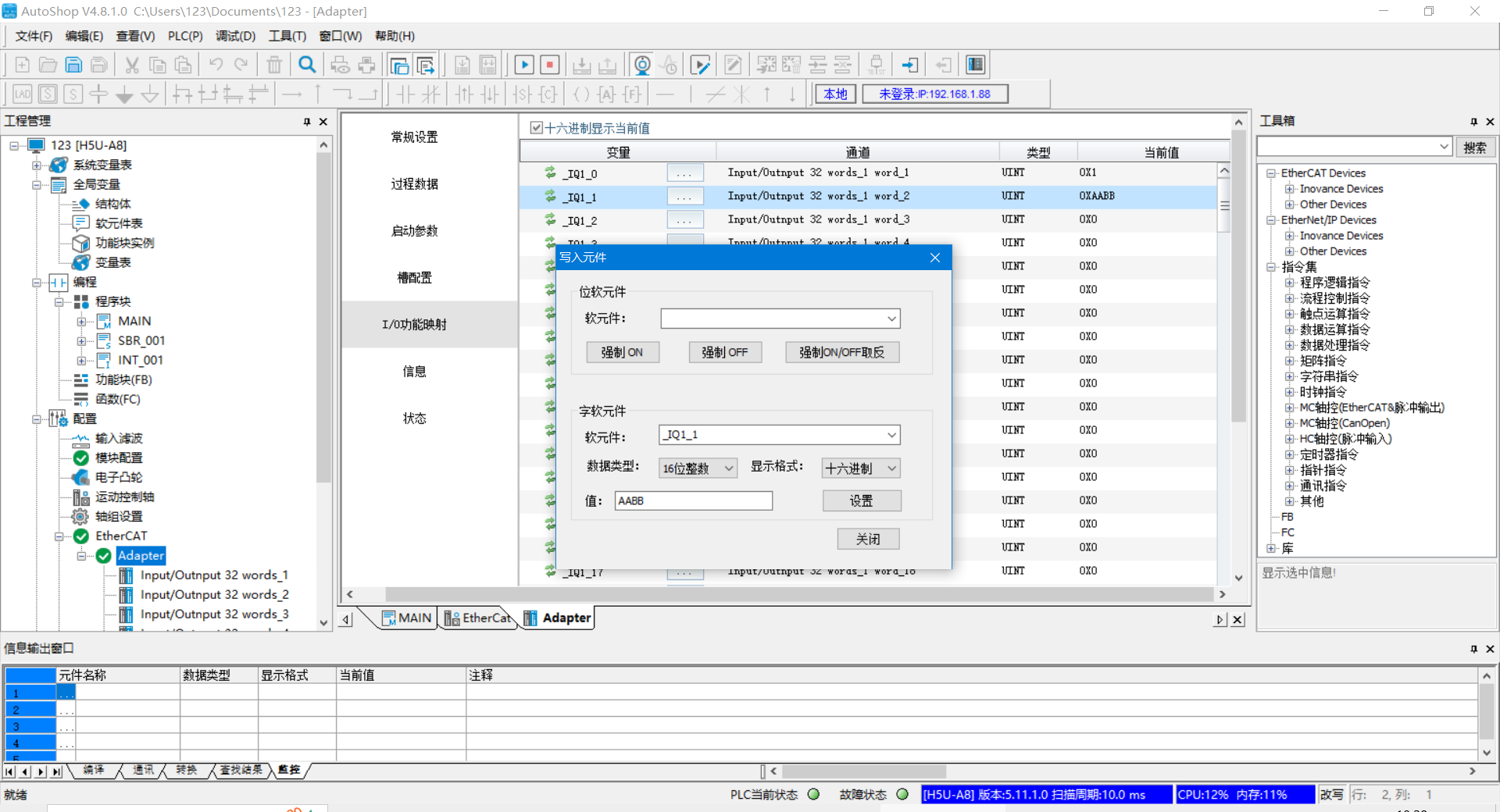
11, 在 Modbus Slave 软件中可以监视到,数据已经成功下发。
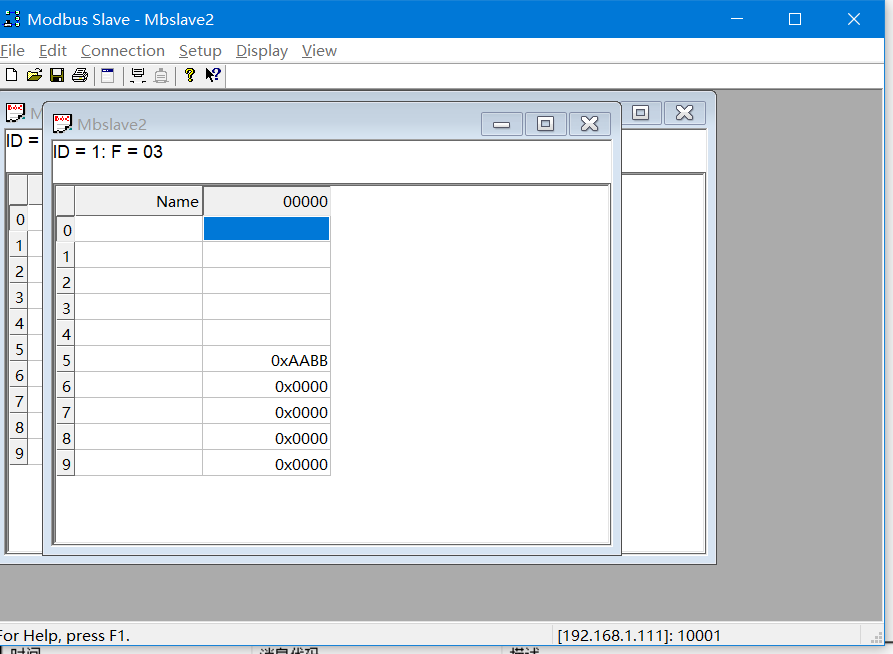
12, 数据传送
如下图,使用Modbus POLL软件连接ECTM-TCP网关,并发送31个字的数据给ECTM-TCP网关。
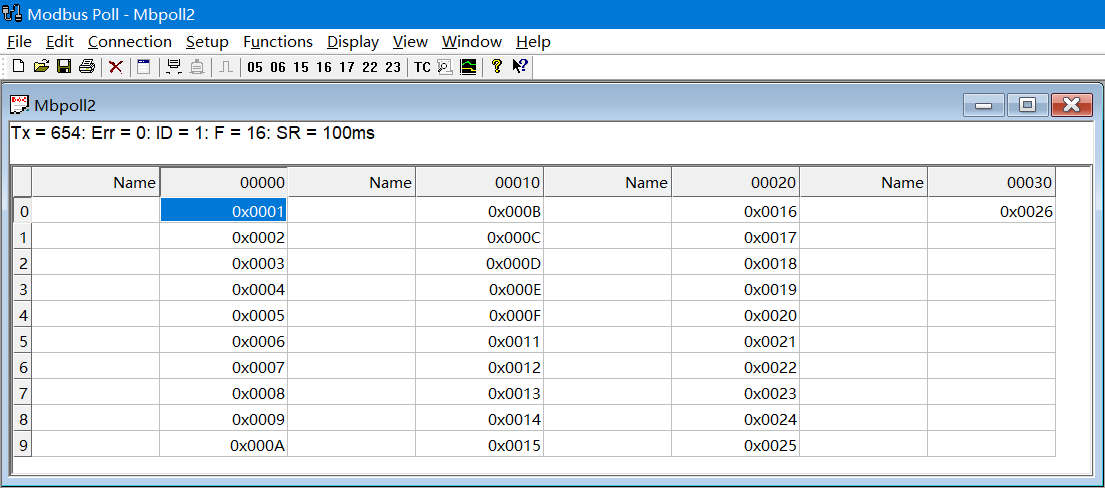
13, 在ECTM-TCP中读到数据如下:
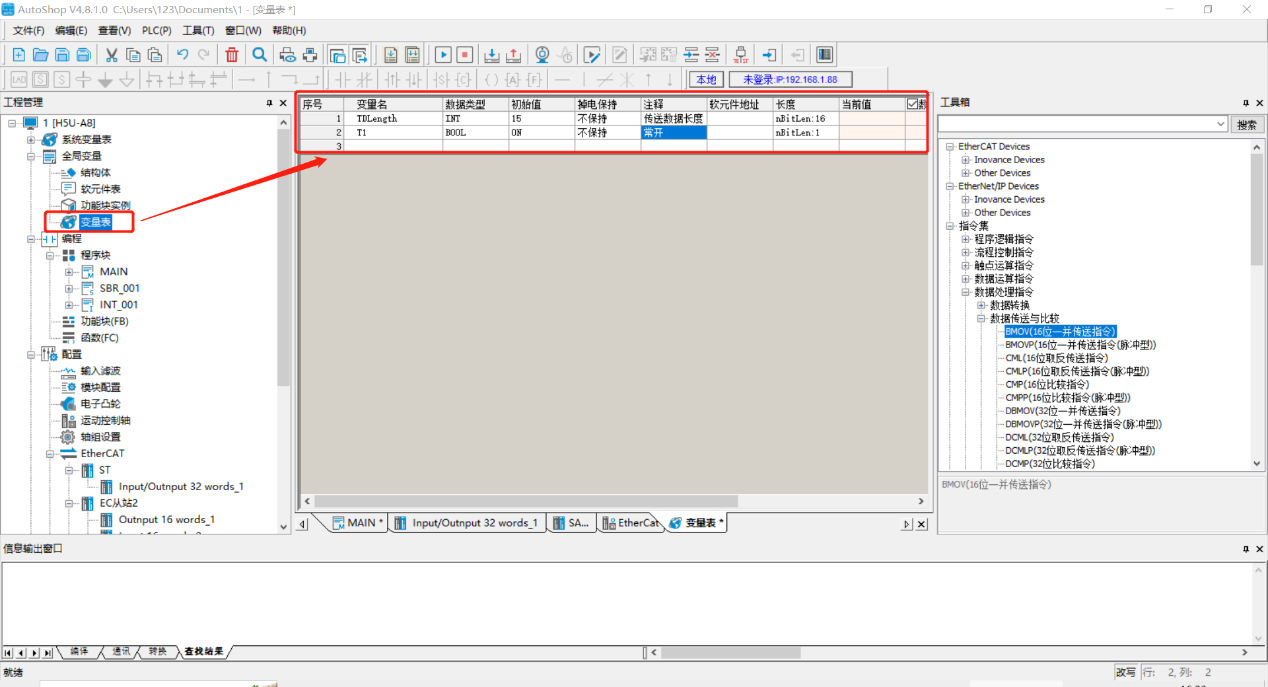
14, 现需将读到的第9个字到第23个字的数据(共15个字数据)传送到EC从站2的输出区中的第1个字到第15个字中。方法如下:
在变量表中建立如下两个变量。
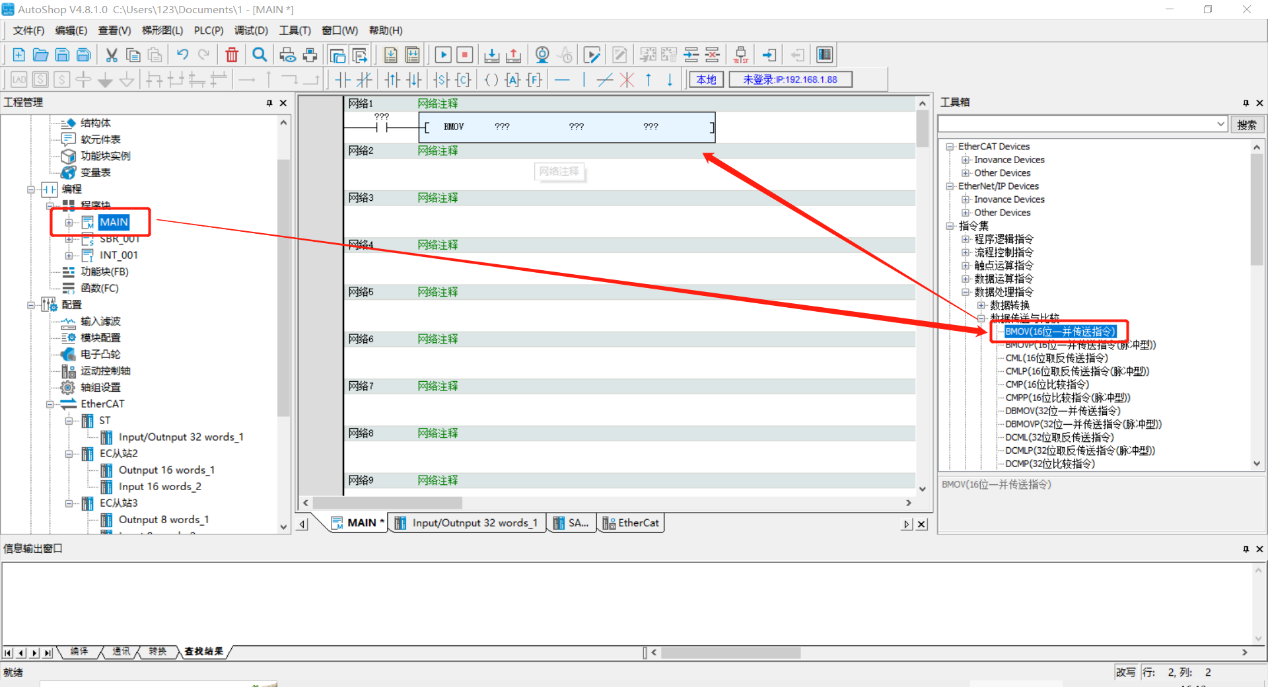
15, 在左侧项目树中,双击MAIN,在右侧工具箱中选择“指令集——数据处理指令——数据传送与比较——BMOV(16位一并传送指令)。
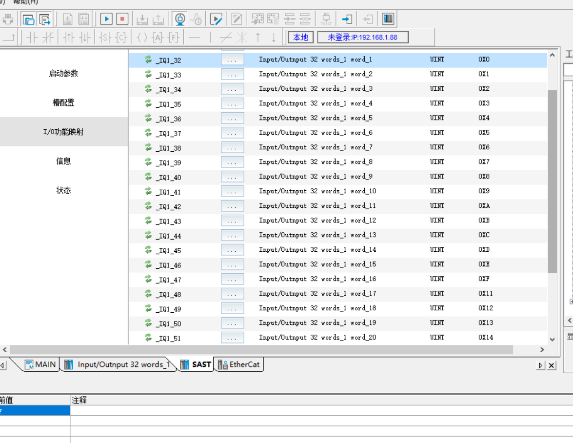
16, 经过“5.6——1”的步骤已知第9个字的变量名为“_IQ1_41”。
点击“EC从站2——IO地功能映射”,可以看到EC从站2的输出区的第一个字变量名为“_IQ3_1”。
17, 返回MAIN界面,可以看到BMOV函数的使用方法。
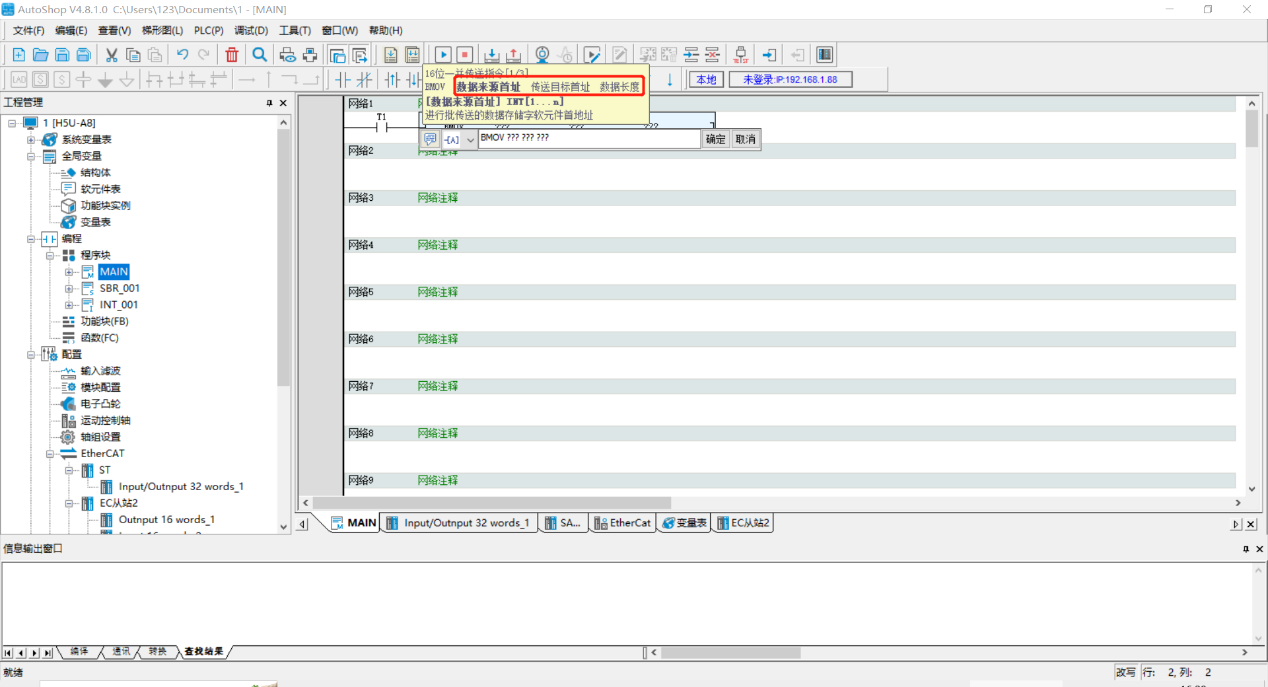 18, 按照下图填写此函数。
18, 按照下图填写此函数。

19, 点击PLC——编译——下载——运行——监控。

20, 此时EC从站与PLC通讯正常。可以在“EC从站2——IO映射功能中”中查看第1个字到第15个字的数据。

21, 现需将读到的第24个字到第31个字的数据(共8个字数据)传送到EC从站3的输出区中的第0个字到第7个字中。方法如下:
在变量表中建立如下两个变量。
22, 在左侧项目树中,双击MAIN,在右侧工具箱中选择“指令集——数据处理指令——数据传送与比较——BMOV(16位一并传送指令)。
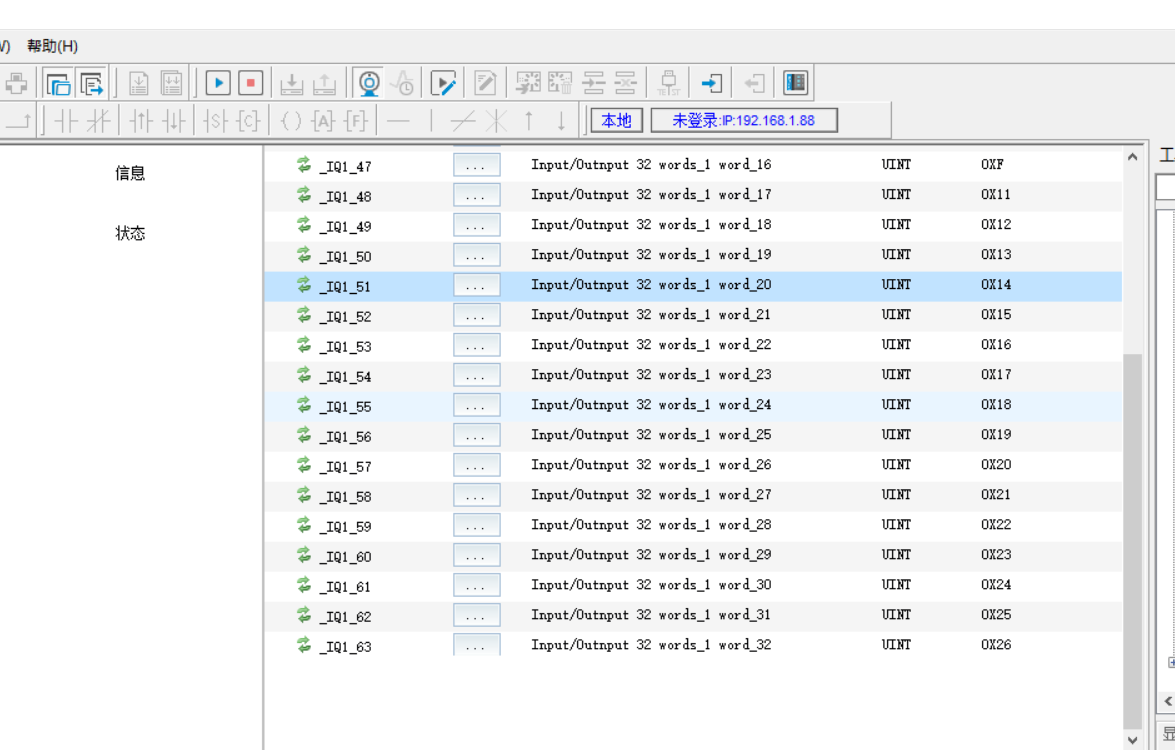
23, 经过“5.6——1”的步骤已知第9个字的变量名为“_IQ1_56”。
点击“EC从站3——IO地功能映射”,可以看到EC从站3的输出区的第一个字变量名为“_IQ5_0”
24, 返回MAIN界面,可以看到BMOV函数的使用方法。
25, 按照下图填写此函数。
26, 点击PLC——编译——下载——运行——监控。
27, 此时EC从站与PLC通讯正常。可以在“EC从站3——IO映射功能中”中查看第0个字到第7个字的数据。
远创智控YC-ECTM-TCP通过实现 ETHERCAT 与 Modbus TCP 设备之间的高效通信和协同工作,提高了工业自动化系统的整体性能。在生产过程中,设备之间的数据交互更加及时、准确,能够快速响应生产工艺的变化和调整,减少了生产过程中的延迟和误差。
远创智控YC-ECTM-TCP通讯网关,让你的工作更高效,沟通更顺畅!赶快来评论区分享你的想法吧!
EtherCAT主站协议转换网关
EtherCAT转ProfiNet智能网关将欧姆龙NJ501指令转换至罗克韦尔1734-AENT读取封口温度与包装计数
智慧港口倍福PLC和欧姆龙CJ2M系列PLC通过协议转换网关进行通讯去控制DeviceNet从站设备案例
EtherCAT转Modbus RTU 网关:实现通用机械加工异构设备无缝通信
EtherCAT转Modbus RTU:智能仓储AGV与输送线通信互联改造打通汇川控制器与传感器数据链路
EtherCAT转Modbus RTU:工业网关实现倍福PLC与电芯电压传感器通信互联
EtherCAT转EtherCAT协议转换网关实现欧姆龙PLC与汇川PLC通讯的配置案例
快递分拨中心西门子S7-1500PLC通过EtherCAT主站转Profinet工业智能网关与多个伺服驱动器进行通讯解决方案案例
CC-Link IE FB转EtherCAT协议转换网关实现台达伺服与三菱PLC通讯的配置案例




