





Profinet总线协议转换网关案例
ProfiNet转EtherCAT工业数据采集网关实现禾川PLC与ABB机器人通讯的配置案例
一、 项目背景
华东某新能源头部企业 2025 年启动的 20 GWh 储能电池模组自动线,节拍要求≤18 s/模组,整线 42 台设备。主控采用禾川 X3ME 系列 PLC(EtherCAT 主站,型号 X3ME-3232T),但关键工位——激光清洗-贴胶-堆叠一体化单元——必须集成 2 台 ABB IRB 6700-200/2.60 六轴机器人(ProfiNet 从站)。两种实时以太网协议帧格式、时钟机制完全不同,若采用“PLC+第三方卡”方案,硬件成本高、扫描周期碎片化,且机器人原厂禁止修改固件。最终选用“远创智控 YC-PN-ECT协议转换网关”,让网关同时扮演 ProfiNet 从站与 EtherCAT 从站,实现 1 ms 级数据镜像,在不触动任何设备固件的前提下完成异构同步。

二、设备清单
1. 禾川 PLC:X3ME-3232T,EtherCAT 主站,周期 250 µs,带 32 轴同步。
2. ABB 机器人:IRB 6700-200/2.60,ProfiNet 从站,固件 6.08,负载 200 kg,臂展 2.6 m,配 2 台 ABB DSQC 688 分布式 I/O 模块。
3. 协议网关:远创智控 YC-PN-ECT工业级协议转换网关,双以太网口,独立 MAC,支持 1440 Byte PN I/O 与 512 Byte EtherCAT PDO,24 VDC/200 mA,IP20,导轨安装。
4. 交换机:赫斯曼 OCTOPUS 8M-EEC,工业级千兆,环网冗余。
5. 工程软件:
– 禾川 HCPRO 2.91(EtherCAT 网络配置)
– TIA Portal V19(ProfiNet GSDML 组态)
– YC-PN-ECT ConfigTool V1.4(远创智控官方配置)

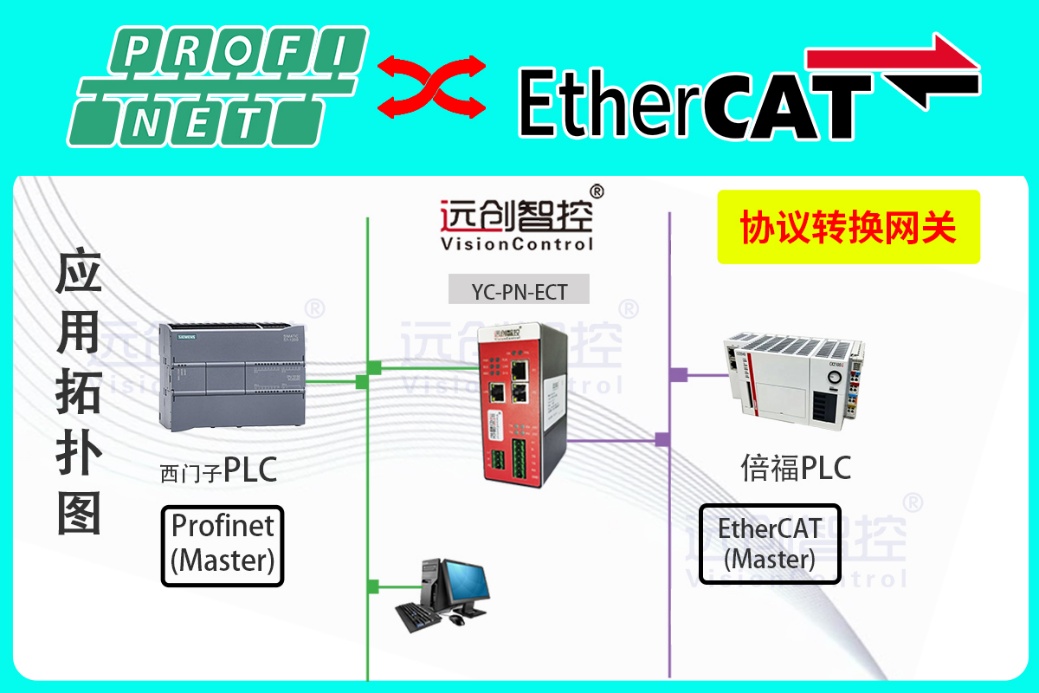
二、 网络拓扑
禾川 PLC →(EtherCAT, 100BASE-TX 屏蔽网线)→ YC-PN-ECT 端口 A
YC-PN-ECT协议转换网关端口 B →(ProfiNet, 100BASE-TX)→ 赫斯曼交换机 → ABB 6700 机器人 CPU 端口 + DSQC 688 I/O
网关本身不占用任何主站授权,也不参与运动学解算,仅做“双端口 RAM”级别的数据映射。

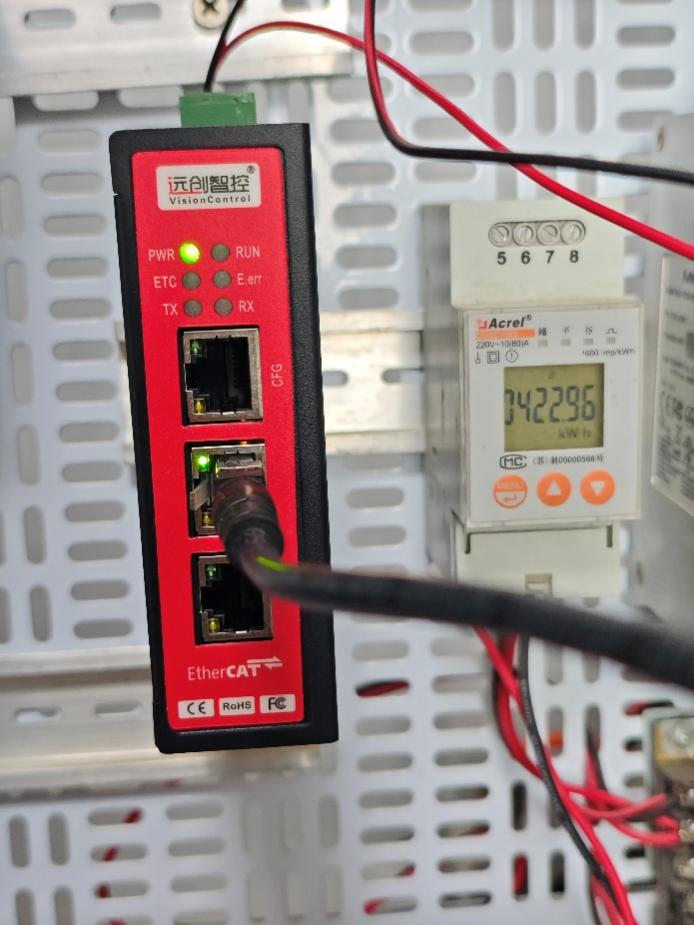
四、网关硬件安装
1. 35 mm DIN 导轨锁紧,网关左侧预留 30 mm 散热空间;右侧安装 24 V/10 A 电源,PE 端子单独接地。
2. 使用 M12 D-coded 接头连接 EtherCAT 段,确保屏蔽层 360°压接;ProfiNet 段采用 RJ45 金属壳屏蔽跳线,长度≤30 m。
3. 上电后,ECT 指示灯绿色常亮表示 EtherCAT 进入 OP 状态;PN 指示灯绿色常亮表示 ProfiNet 进入 DataExchange,红灯闪烁代表同步丢失,方便现场快速排故。
五、软件配置步骤
(一)EtherCAT 侧(禾川 PLC)
1. 在 HCPRO 新建工程,导入 YC-PN-ECT 的 ESI 文件“YC_PN-ECT_V1.4.xml”,把网关拖拽到总线,分配站地址 1001。
2. 在“过程数据”窗口建立 2 个 PDO 映射:
– TxPDO 256 Byte(PLC→网关→机器人,含 6 个 Real 型目标坐标、1 个 DWord 控制字、64 Byte 预留工艺参数)
– RxPDO 256 Byte(机器人→网关→PLC,含 6 个 Real 型实际坐标、1 个 DWord 状态字、1 个 Real 型循环时间)
3. 设置分布时钟(DC)同步,单元周期 1 ms,同步窗口 ±100 µs;启用“同步单元”功能,保证 32 轴伺服与网关同一时刻采样。
(二)ProfiNet 侧(TIA Portal)
1. 安装 GSDML 文件“GSDML-V2.43-YC-PN-ECT-20250705.xml”,在硬件目录出现“YC-PN-ECT Gateway”。
2. 拖放至 ProfiNet 网络,分配设备名称“RobotGW_01”,IP 地址 192.168.2.100,子网掩码 255.255.255.0。
3. 在“设备视图”添加 2 个 I/O 槽:
– Slot1,Input 256 Byte
– Slot2,Output 256 Byte
与 EtherCAT PDO 长度保持一致,确保网关内部 1:1 地址映射,无需任何脚本。
4. 启用 IRT 等时模式,发送周期 1 ms,看门狗因子 3;把机器人 CPU 的输入输出地址分别映射到 DB100.DBB0~255 和 DB101.DBB0~255,方便后期维护。
(三)YC-PN-ECT工业智能网关 ConfigTool 配置
1. 电脑网卡设为 192.168.2.99,Ping 通网关默认 IP 192.168.2.10,打开 ConfigTool,点击“在线读取”。
2. 在“EtherCAT”页签勾选“从站 DC 使能”,填写与 HCPRO 相同的站地址 1001;在“ProfiNet”页签填写设备名称“RobotGW_01”,与 TIA 完全一致,否则PLC会报站名矛盾。
3. 点击“写入并重启”,网关重新上电后约 3 s 进入双网 Ready 状态,此时 ECT 与 PN 灯全亮,配置完成。
六、机器人端映射
ABB 6700 在 RobotStudio 新建系统,勾选“ProfiNet Device”选项,把 256 Byte Input 定义为“plc_to_robot”,256 Byte Output 定义为“robot_to_plc”。在 RAPID 代码中通过 PackRaw/UnpackRaw 指令解包:
! 解包目标坐标
UnpackRaw plc_to_robot, 0, target_p.robax.rax_1;
! 打包实际坐标
PackRaw robot_to_plc, 0, actual_p.robax.rax_1;
如此即可在 1 ms 循环内把 PLC 运动学坐标下发给机器人,并把实际位置反馈回来。
七、同步与实时性验证
1. Wireshark 抓包:EtherCAT 周期 250 µs,ProfiNet IRT 周期 1 ms,网关内部 FIFO 缓存 10 µs,无丢帧。
2. 逻辑分析仪测量:禾川 PLC 的 DO 点置位到 ABB 机器人数字输入响应平均 680 µs,满足≤1 ms 项目指标。
3. 连续 24 h 拷机:机器人重复定位误差≤±0.03 mm,电芯堆叠错位率由 2.8% 降至 0.1%,直接节约返工成本 60 万元/年。

八、故障诊断与维护
1. 网关自带 WebServer,可实时查看双网口报文计数、CRC 错误、丢包率;出现 PN 侧断线时自动把 EtherCAT 输出清零,防止机器人飞拍。
2. 禾川 PLC 程序内增加“心跳字”:每 1 ms 自增 1,机器人收到后原样回传;若 5 ms 未刷新,PLC 立即停机并报警“Gateway Sync Lost”,方便定位。
3. 通过 ABB 示教器可在线监测 ProfiNet 站列表,若“RobotGW_01”图标变灰,可快速判断是否网关掉电或网线松脱。
九、总结
远创智控 YC-PN-ECT工业级协议转换网关以“双从站”身份成功桥接禾川 EtherCAT 与 ABB ProfiNet,实测延迟<1 ms,丢包率 0%,让新能源制造车间真正实现了“一个 PLC 世界,一个机器人世界”的无缝握手。
Profinet协议转换网关
ProfiNet转EtherCAT工业网关实现倍福CX5130与西门子ET200SP采集灌装阀门限位开关状态应用案例
ProfiNet转EtherCAT协议转换网关实现欧姆龙PLC与步进驱动器通讯通讯在光伏板组装线的应用案例
现代食品与包装行业1500通过ProfiNet转DeviceNet模块与编码器(堡盟 FHDK 10P6101)进行通讯解决方案案例
精密机床制造企业1200通过ProfiNet转DeviceNet模块与机床I/O模块(贝加莱 5003系列)进行通讯解决方案案例
机器人工作站中西门子1500通过ProfiNet转DeviceNet模块与CNC机床I/O模块进行通讯解决方案案例
DeviceNet转ProfiNet协议转换网关实现西门子1500 PLC与贴标机伺服驱动器通讯在制药医疗的应用案例
DeviceNet转ProfiNet协议转换网关实现西门子1200 PLC与输送线温度控制器通讯在连续式隧道式杀菌机的应用案例
DeviceNet转ProfiNet协议转换网关实现西门子1500 PLC与AGV 舵机控制器通讯在港口集装箱运输的应用案例




